
Yulong Diving FEM24 underwater active magnetic detection system, taking into account underwater ferromagnetic and non-ferromagnetic target detection capabilities, can be buried underwater aluminum, copper, titanium and iron and ot...
• Electromagnetic field transceiver system
• Signal real-time acquisition system
• RTK positioning system
• A tethered underwater vehicle
•Both underwater ferromagnetic and non-ferromagnetic target measurement capabilities
•Measurement and control distance: 200 m
•Pressure rating: 300 m
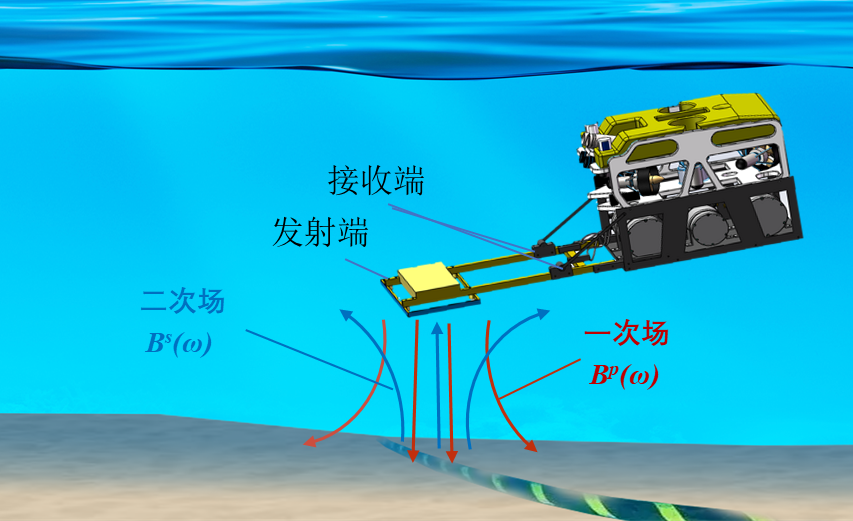
1. How it works
The transmitting coil generates a radiating magnetic field under the excitation of conduction current, which is called the primary field B^p(ω). The primary field is incident on the metal target, according to Faraday's law of electromagnetic induction, the metal target generates eddy currents, and then according to the Ampere loop law, the induced magnetic field is called the secondary field B^s(ω), which can be sensed by the receiving end of the FEM24.
2. Quick and easy installation
The system uses quick disassembly structure design, and the system assembly can be completed in 10min.
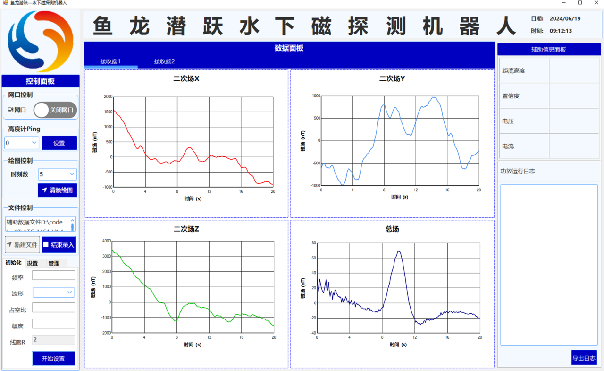
3. Integrated display
ROV magnetic detection system can display the information of primary and secondary fields.
4. Provide a target location
The location of metal target is determined by RTK positioning data and magnetic anomaly signal mapping.
1. What can it detect?
It can be used to detect all types of metal objects, such as submarine cables containing aluminum, copper, titanium, iron, pipes, unexploded bombs.
2. Detection capability?
The depth and tracking distance of 2.5cm armored cable are 1.2m;
1cm without cable depth and tracking distance of 0.6m;
The depth and tracking distance of 15cm armored cable are 1.8m;
10 "pipe depth and tracking distance of 3.0m;
The 4 "pipe depth and tracking distance is 2.2m.
3. Ideal sailing depth?
In the case of determining the safety of the system, as close as possible to the bottom, it is recommended to be 0.5m from the bottom and above.
4. Can sand buried targets be detected?
Yes, the sand does not affect the work of the sensor or weaken the magnetic field strength, and cross-domain detection can be achieved.
a) Active magnetic detection System (basic package)
b) Muddy Water Camera (Basic package)
c) Ultra Short Baseline positioning System (optional)
d) Multi-beam sonar Imaging Sonar (optional)